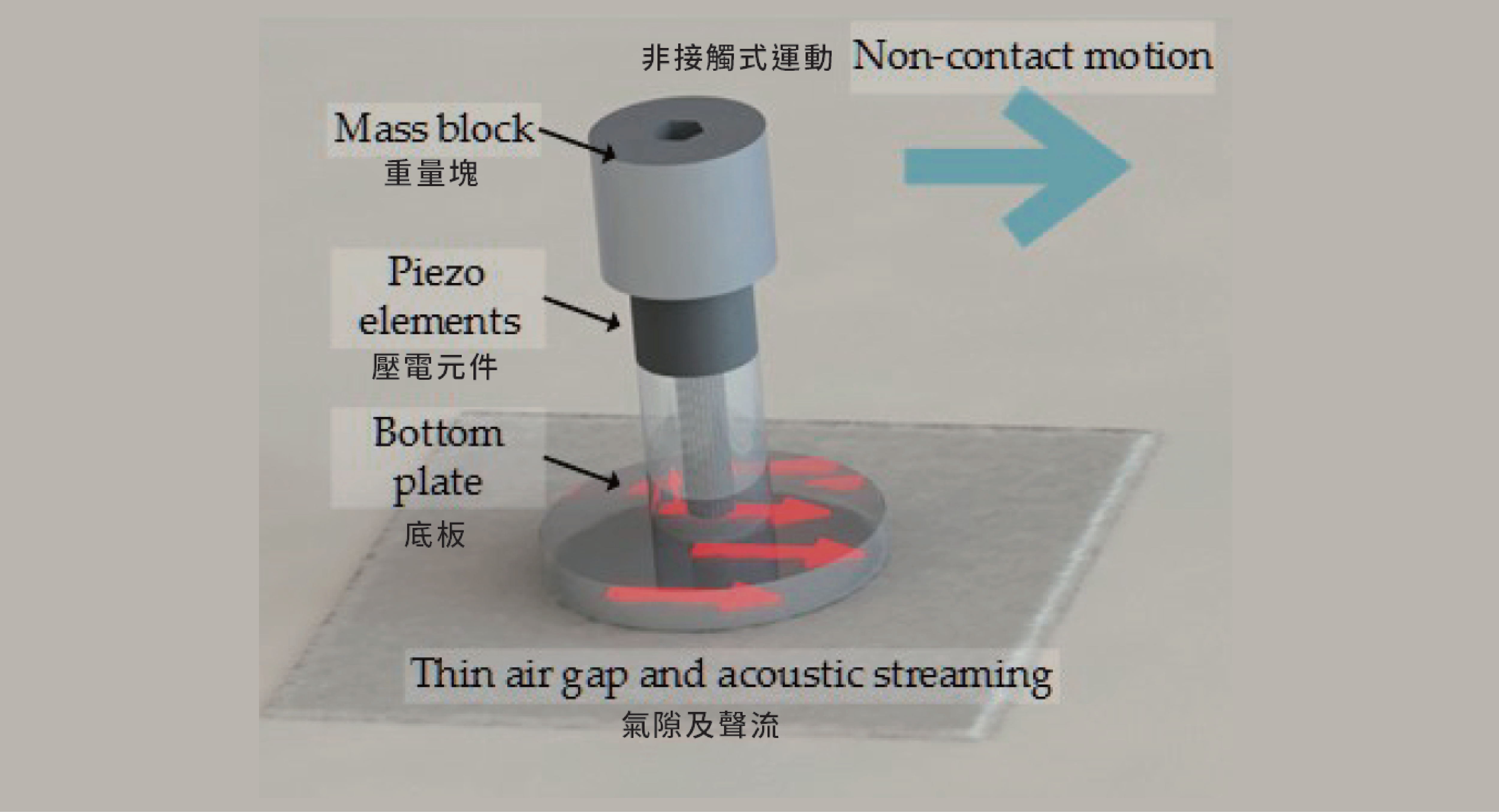
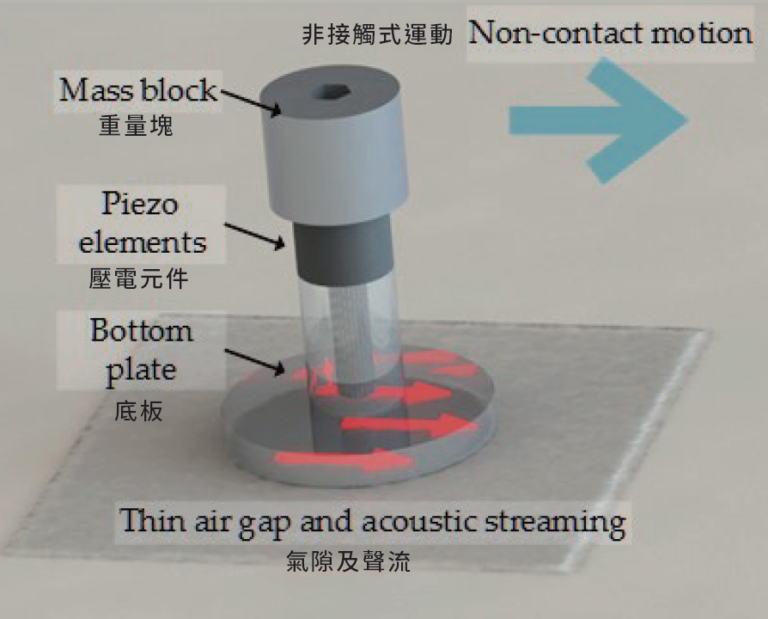
A self-running and self-floating actuator for non-contact motion in designated two-dimensional directions.
Non-contact actuators, such as air bearings and magnetic levitation bearings, are widely employed in precision machine-tools, nanotechnology, and metrology for their high precision, low noise, negligible friction and wear. However, these actuators have their drawbacks such as complex design, high costs, constrained moving ranges, electromagnetic interference, undesirable noise, requirement of clean air, etc.
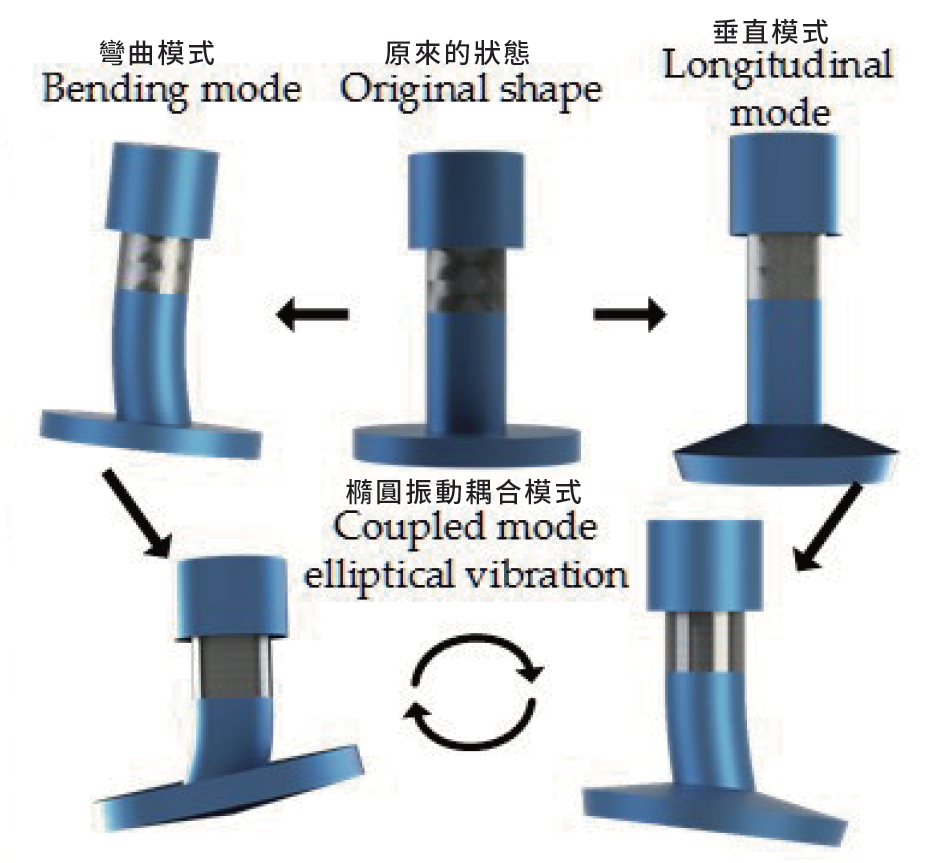
Acoustic radiation force in the near-field of a vibrating source can be utilized to lift and transport objects, which provides a non-contact driving technology in addition to magnetic levitation. This project focuses on a novel self-running and self-floating planar motion stage capable of two-dimensional motion with an unlimited travel range. The proposed design exploits near-field acoustic levitation for object lifting, and coupled resonant vibration for generation of acoustic streaming for non-contact motion in designated directions.