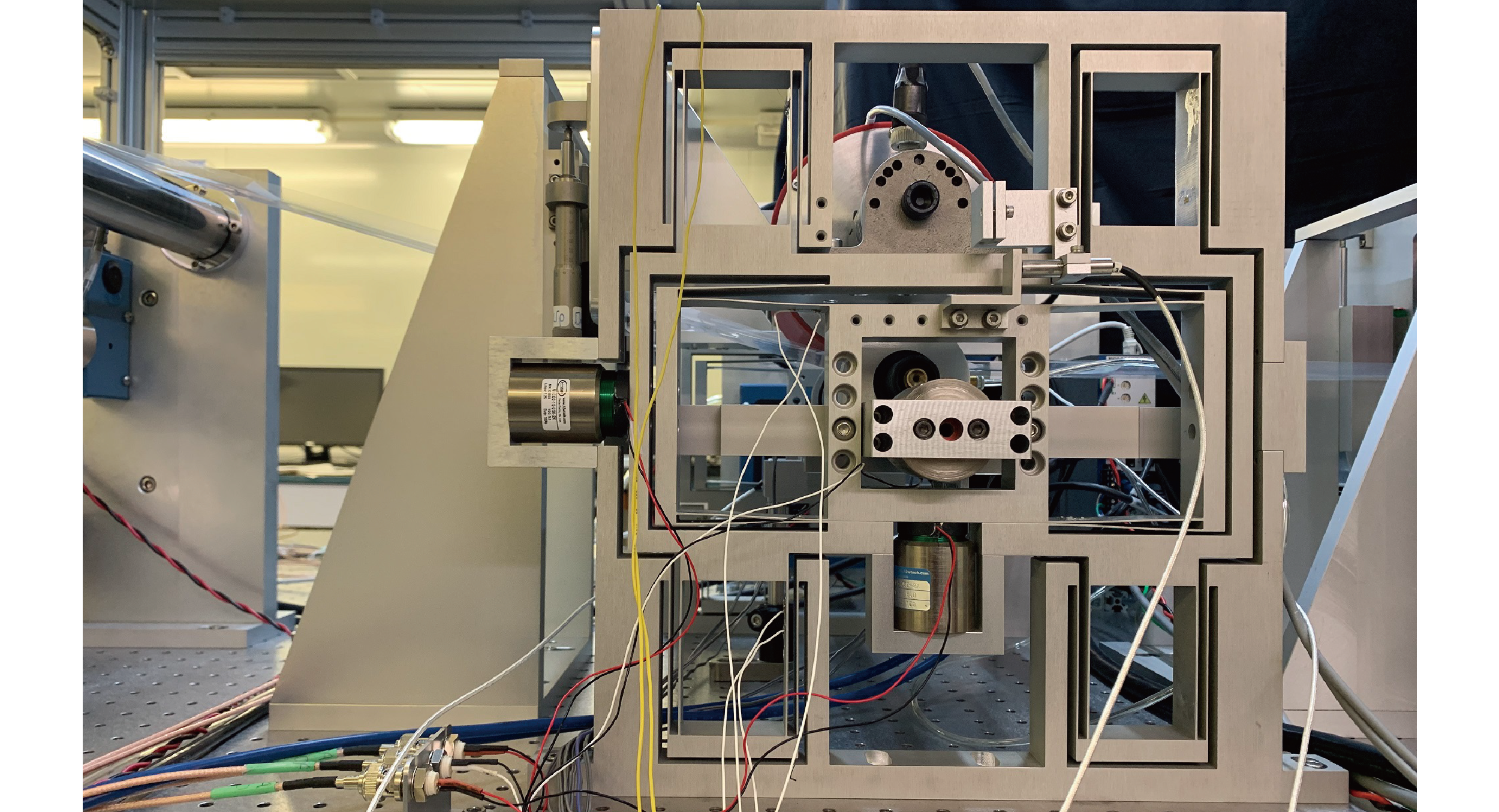
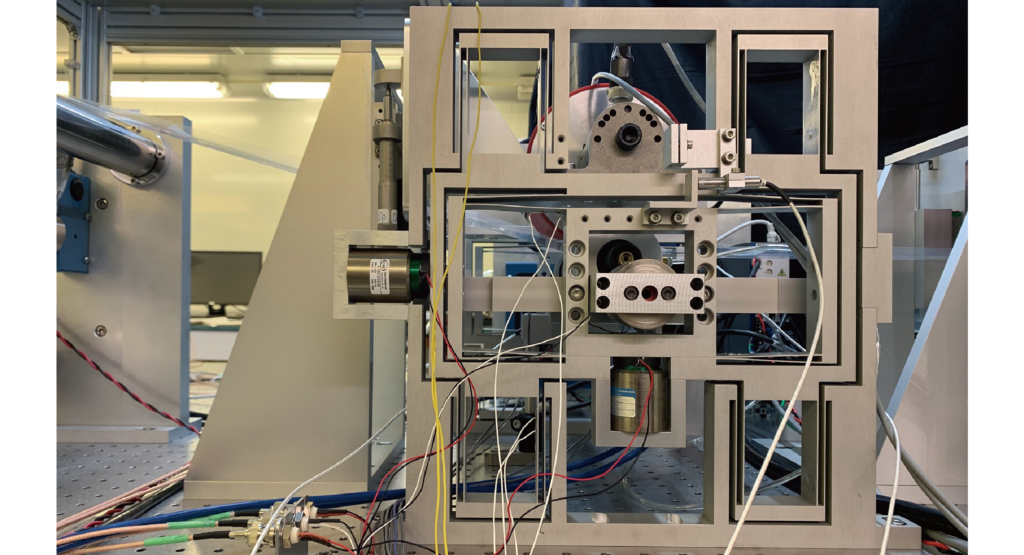
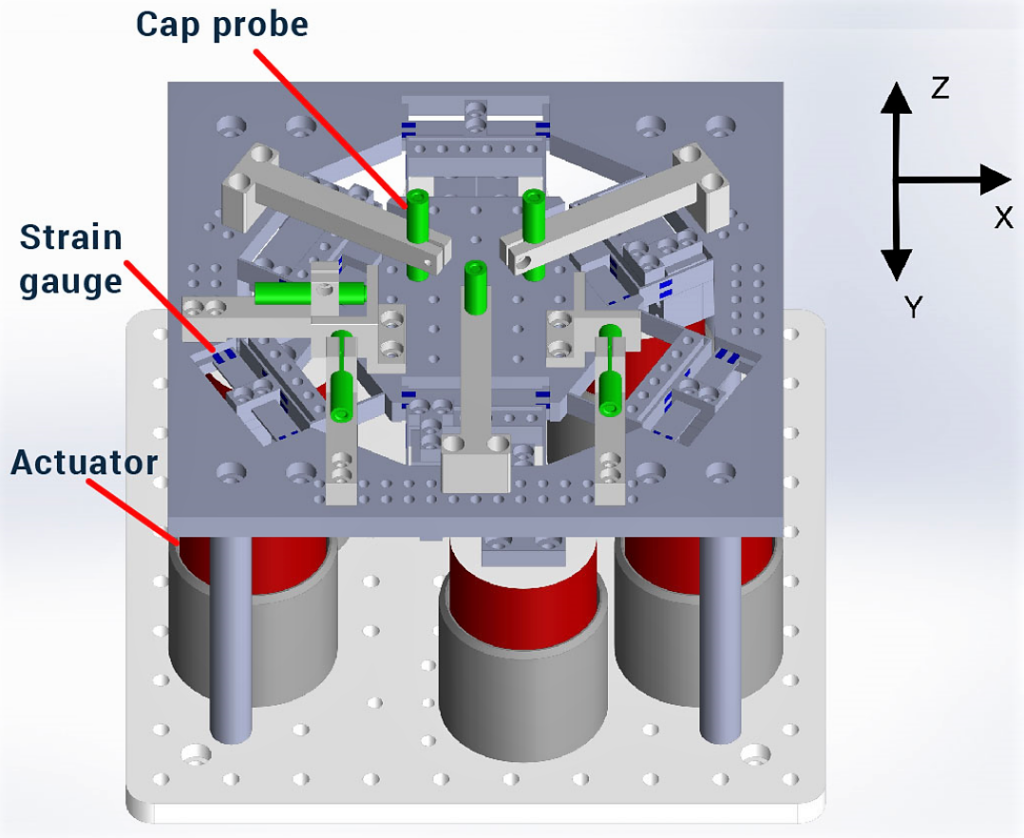
定位與機器人技術是大範圍自動化製造的基本要素。然而,現有的機器人平台僅能使工業機器人執行常規、簡單的裝配流程,且精度較低(在百微米至毫米的範圍),所使用的傳感器十分昂貴。我們將深度學習與精密工程理論結合以提高效率以及精度,發展新一代應用於低成本、高精度製造業的精密儀床與機器人平台。 特點及優勢: 現時的系統多使用昂貴的電容式感應器,我們提出使用低成本的應變片取代。深度學習算法能夠實現機器行為的學習與預測,在訓練階段,使用高精度傳感器作為參照將定位誤差最小化;同時傳感陣列與致動器的數量及排布將通過深度學習模型進行優化。通過有效結合確定性及統計方法,利用價格低廉的傳感器陣列預測機械運動並達到幾十納米至亞微米的精度。 裝配有低成本應變片陣列的R2R 系統, 以控制X-Y兩個方向上的運動 裝有低成本應變片的六軸平台以替代高成本電容式感應器