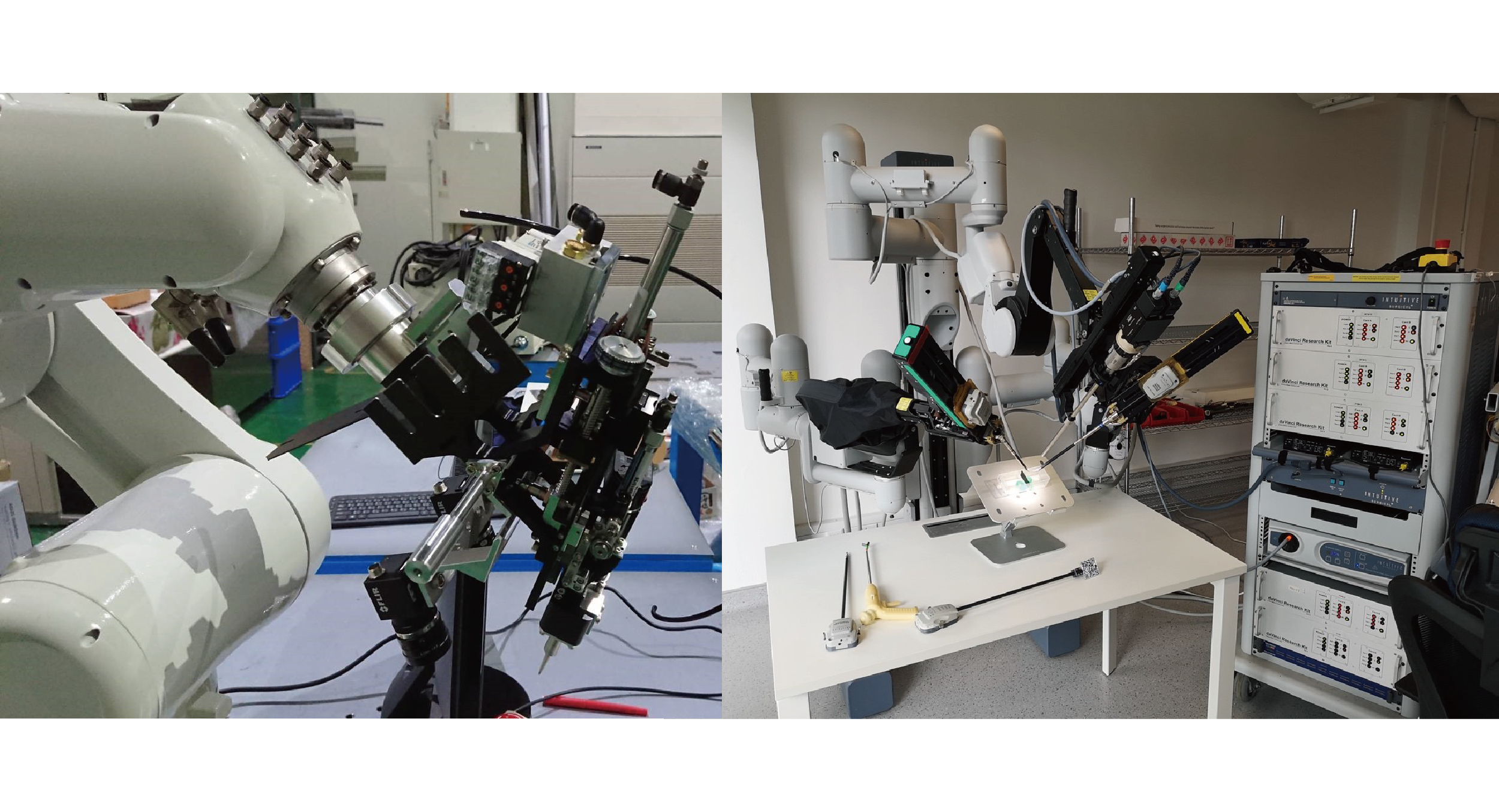
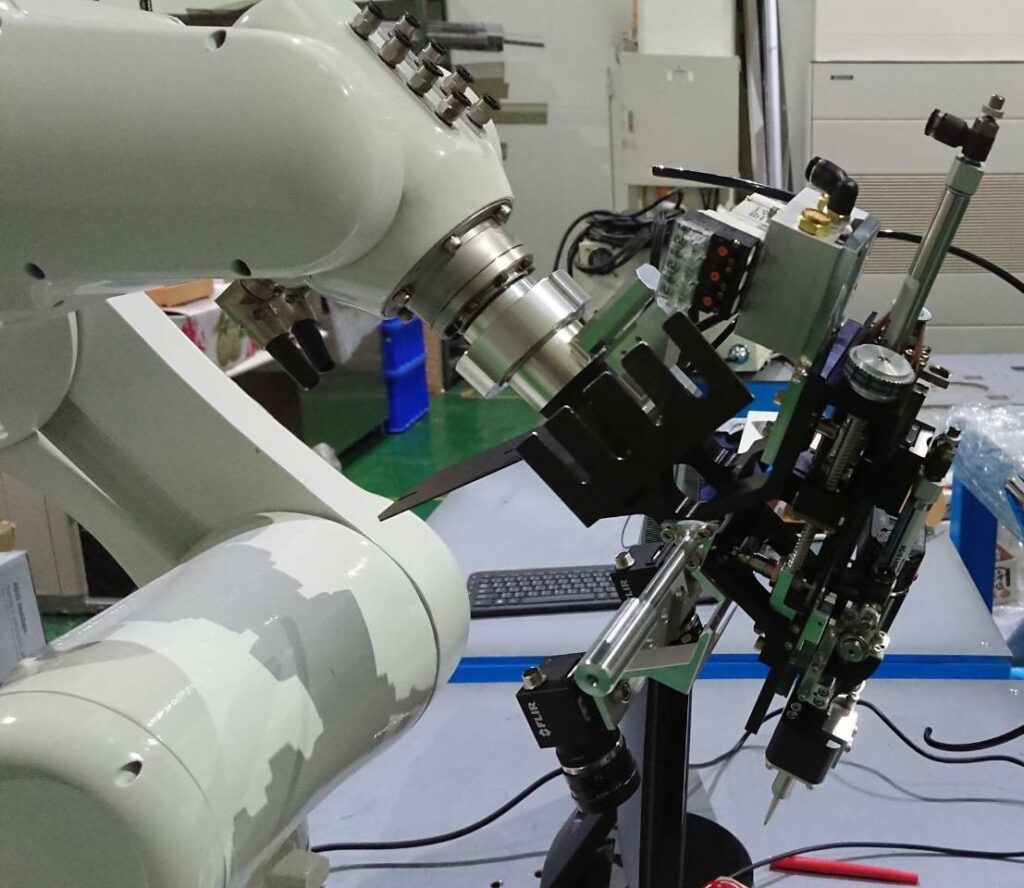
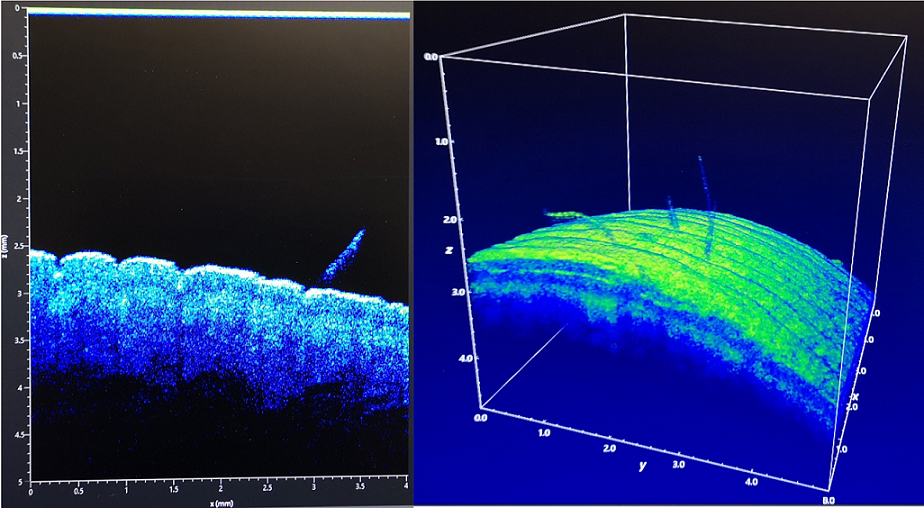
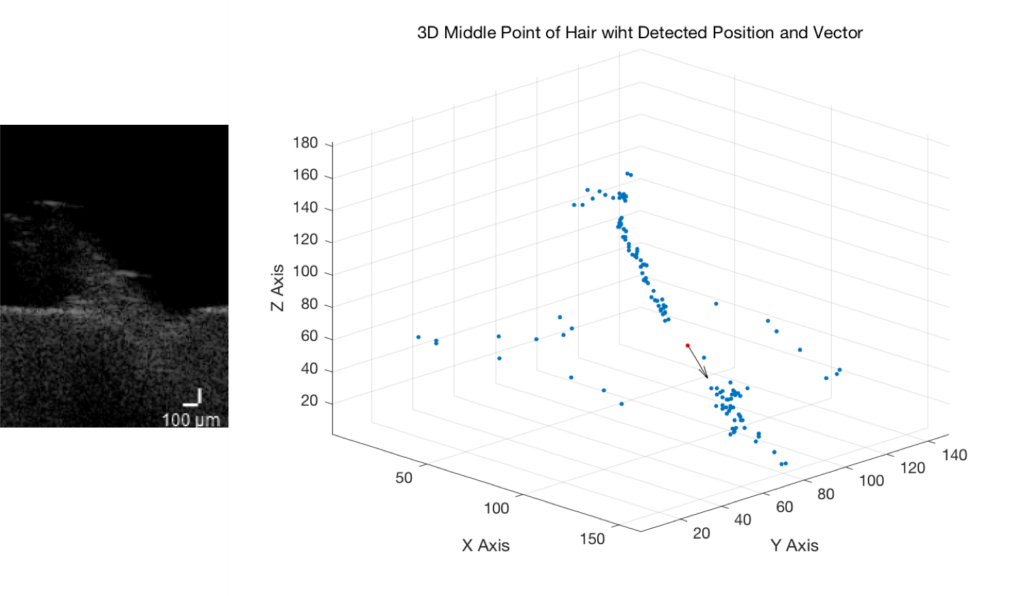
醫療機器人近年發展迅速,已廣泛應用於全球和香港眾多醫院。越來越多的傳統開放式外科手術被輔助式微創手術機器人所取代。然而,由於缺乏實際觸覺反饋,機器人有時會意外切斷血管,造成醫療事故。中大研究團隊研發出一套創新的成像與傳感系統,可集成於不同的機器人系統上,例如:達芬奇外科手術系統,以提高精度、靈活性與安全性,減少可預防的醫療事故。 系統包括小型化的光學相幹斷層掃描機器視覺系統 (OCTRVS) 及高靈敏度的柔性觸覺傳感器。OCTRVS能夠實現深度在2 – 5毫米的實時下表皮3D血管成像;柔性觸覺傳感器則提供高靈敏度、真實、實時的觸覺反饋(壓力靈敏度為2 kPa-1; 力量測範圍為0-10 N),反饋機器終端真實的觸感給外科醫生。 特點及優勢: 高速的、實時的,亞表面3D機器視覺系統高靈敏度、真實的、實時觸覺反饋緊湊的可集成化的模塊 應用: 這種新型的視覺與電子傳感系統將迅速在醫療機器人平台中應用實施,用以提高精度,靈活性與安全性。\ 例子 – 六軸植髮機器人 六軸機器人手臂被用於展示,光學相幹斷層掃描機器視覺系統(OCTRVS)和柔性觸摸傳感技術,在一些醫學機器人系統上的應用。我們把我們研發的OCTRVS系統集成在一個高精度植髮機器人上。可以實時的看到下表皮2-5 mm的3D圖像。相比較傳統的估算算法,我們可以直接觀察到頭髮的毛囊以及髮根的方向。 目標用戶: 01本地醫院 02診所、美容機構 03美容及手術機器人製造商 集成了OCTRVS的植髮機器人 人體上表皮和下表皮的OCTRVS圖片,頭髮以及毛囊被清楚的標定出来 2D的頭髮OCTRVS圖片(左圖);右圖是通過演算法標定的頭髮向量座標 OCTRVS系統將會配合達芬奇手術機器人一起工作