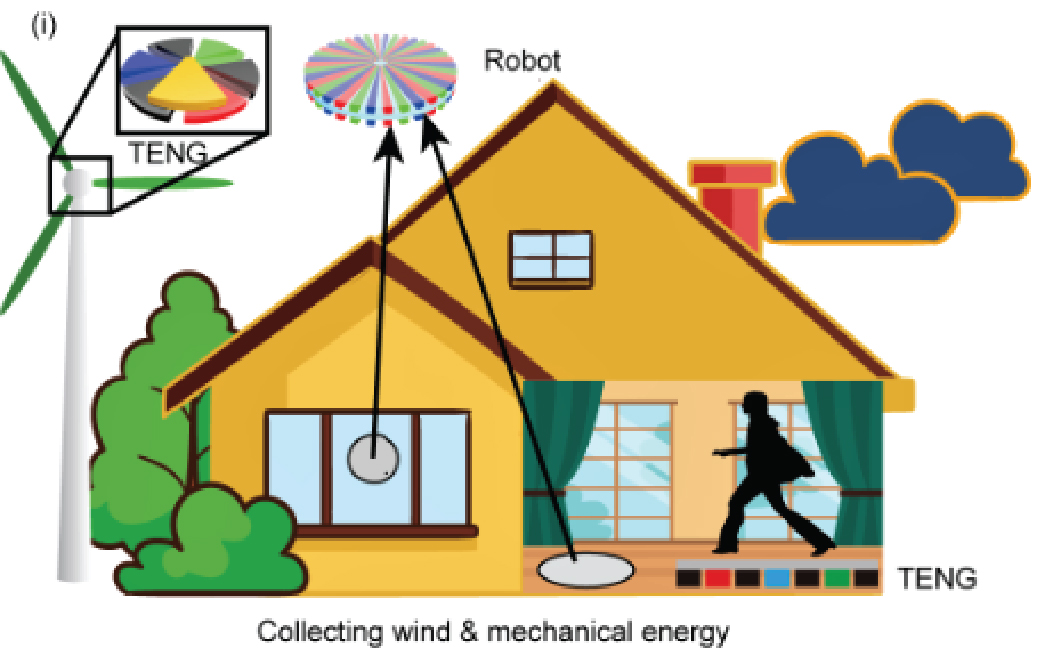
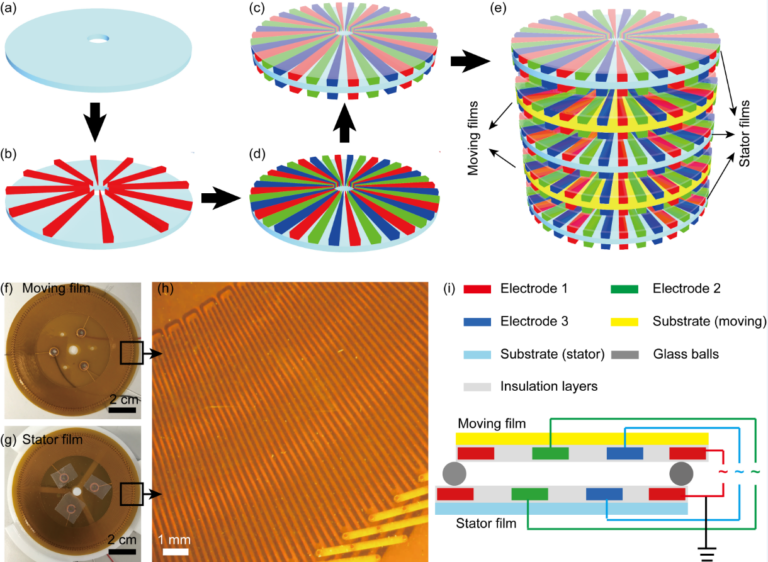
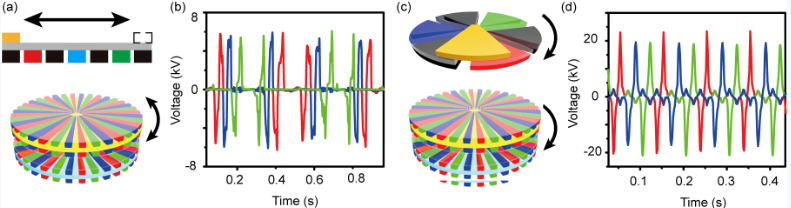
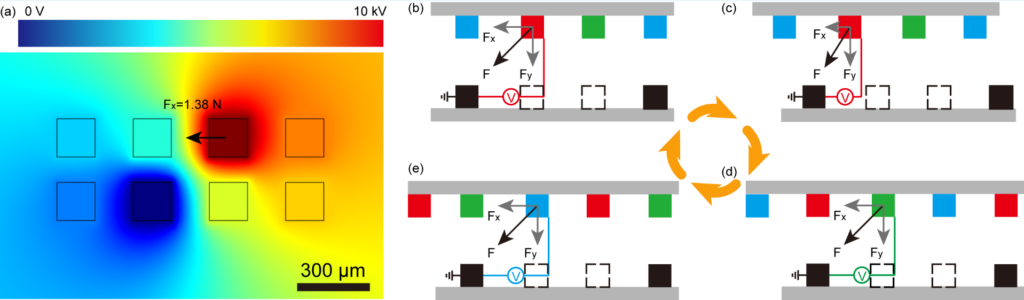
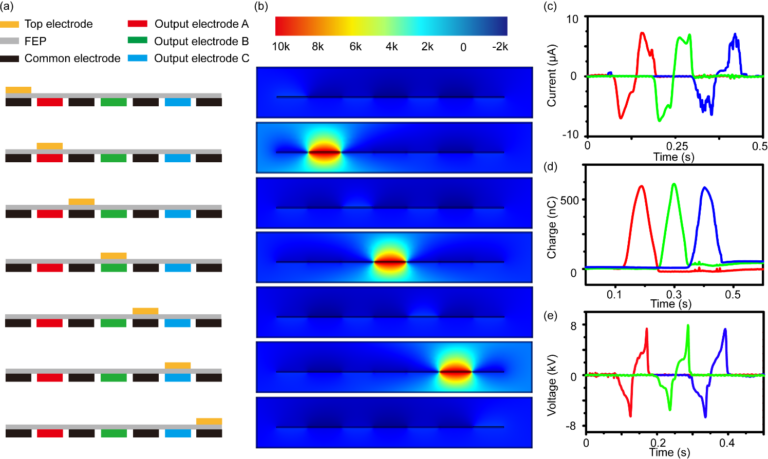
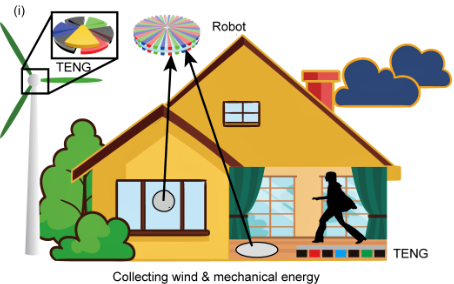
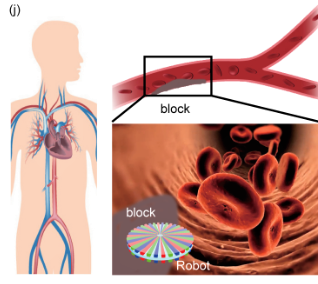
(a)-(e)靜電機器人製備流程。(f)靜電機器人運動部分。(g)靜電機器人固定部分。(h)放大後的器件電極。(i)靜電機器人供電方式。 柔軟超薄的機器人可以在狹窄等特殊環境下工作,如用於工業用途、清潔系統和醫療服務。然而,為微機器人系統提供穩定電能仍然是一個挑戰。我們開發了一種三相摩擦納米發電機,能夠將環境中的機械能轉換為電能,從而為靜電機器人提供能量。自驅動靜電機器人可應用於家用清潔機器人、血栓疏通機器人等。 (a)-(b)3相摩擦納米發動機驅動靜電機器人來回運動。 (c)-(d) 3相摩擦納米發動機驅動靜電機器人單方向連續運動。 特點及優勢: 柔軟超薄的系統三相摩擦納米發電機收集環境中機械能並轉化為電能自供電系統,無需外部電源能夠遠程傳輸,精確控制機器人系統的運動 (a)通過有限元模擬摩擦納米發電機驅動靜電機器人時受力分析。(b)-(d)3相摩擦納米發電機驅動靜電機器人的原理。 3相摩擦納米發電機結構及輸出性能。 收集風能及人體機械能的自供電清潔靜電機器人示意圖。 收集血液中機械能的血栓清理機器人示意圖。