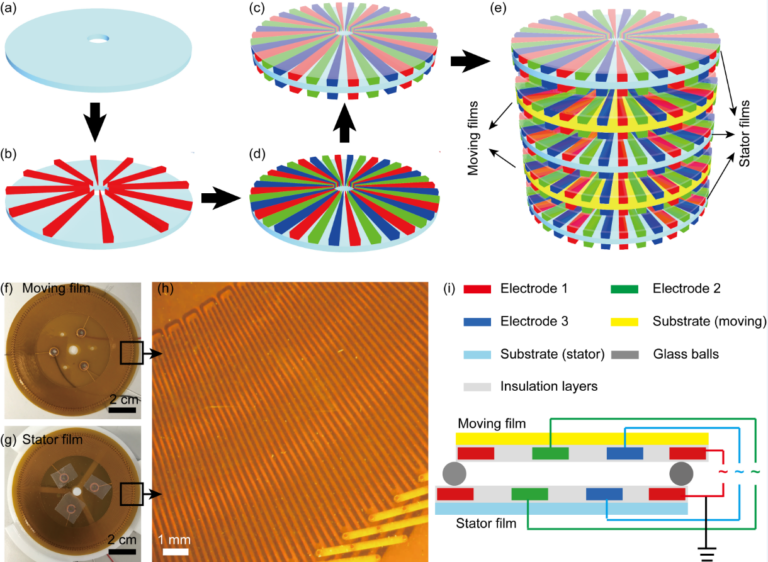
(a)-(e) The fabrication process of the electrostatic robotics. (f) The moving part of the electrostatic robotics. (g) The fixed part of the electrostatic robotics. (h) The magnified picture of the electrodes of the device. (i) Powering the electrostatic robotics.
Flexible and ultra-thin robots can work in special environment, such as industrial use, cleaning systems and medical operations. However, powering micro robot systems is still a challenge. We develop a three-phased triboelectric nanogenerator (TENG) that can convert mechanical energy in the environment into electrical energy, and hence produce a self-powered electrostatic robot. Potential applications include cleaning robot for home, thrombolytic therapy for severe blood clots, etc.
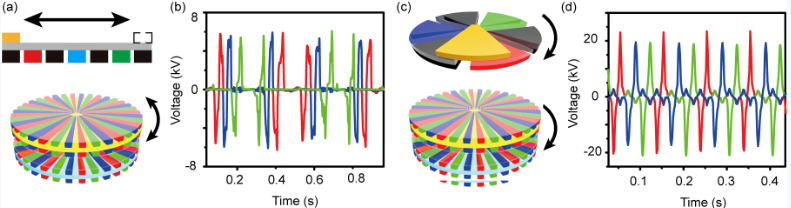
(a)-(d) Electrostatic robotics powered by three-phased triboelectric nanogenerator.
Uniqueness and Competitive Advantages:
Flexible and ultra-thin system
Three-phased TENG can convert mechanical energy in the environment into electrical energy
Self-powered system does not require an external power supply
Energy can be remotely transmitted and the movement of the robot can be precisely controlled
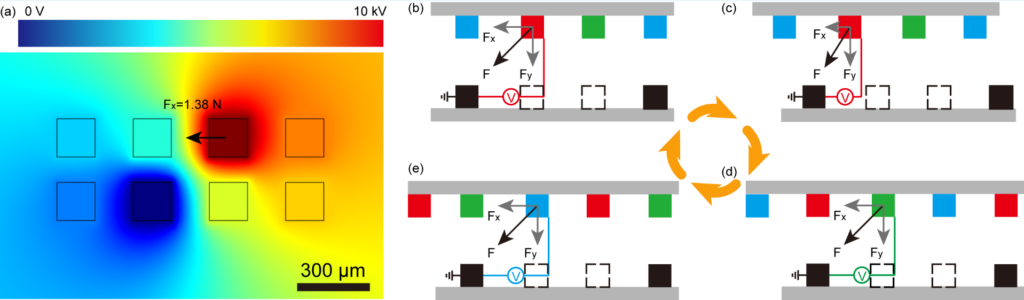
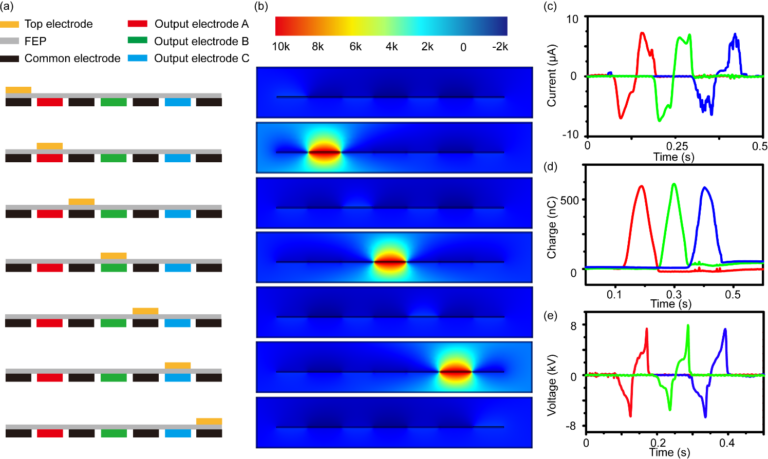
(a)The simulated driving force by COMSOL software when the 3-phased triboelectric nanogenerator powering the electrostatic robotics. (b)-(d) The working principle when the 3-phased triboelectric nanogenerator powering the electrostatic robotics.
The structure and the output performance of the three-phased triboelectric nanogenerator.
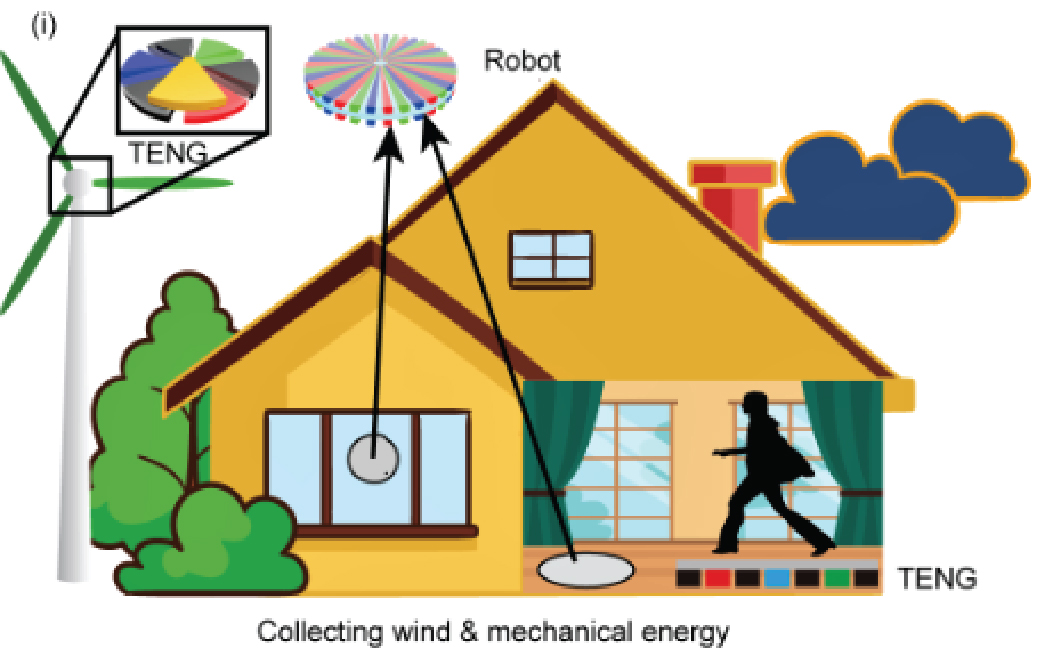
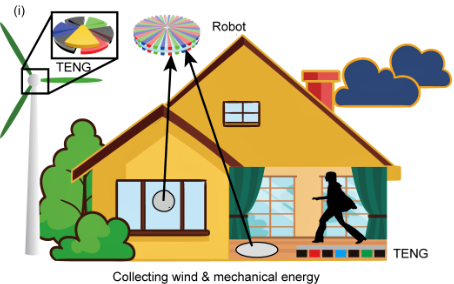
Collecting wind energy and mechanical energy to power the cleaning robot.
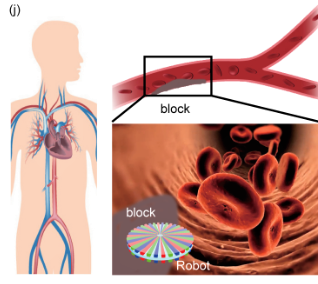
Collecting mechanical energy from blood to power the micro cleaning robot.