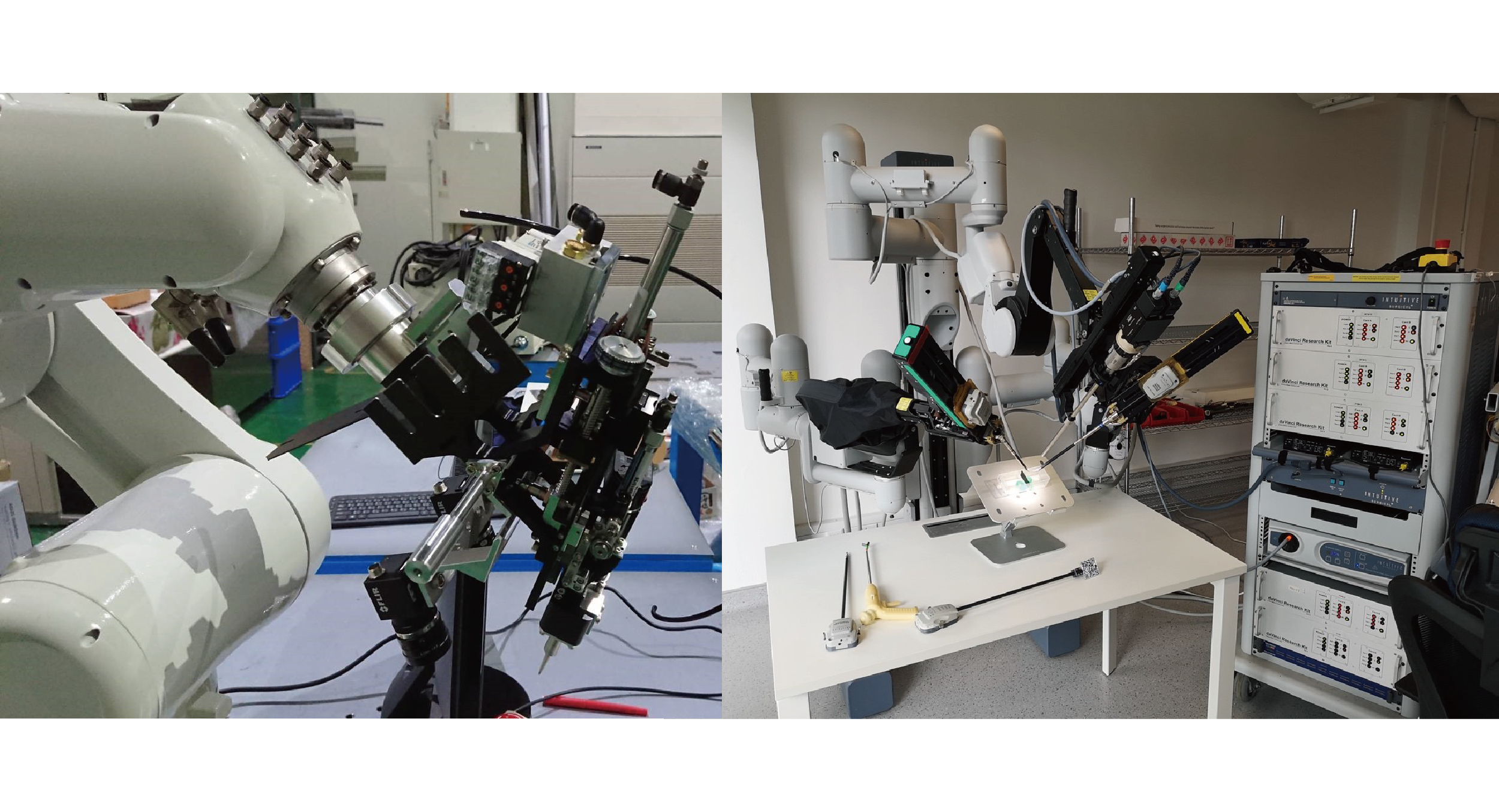
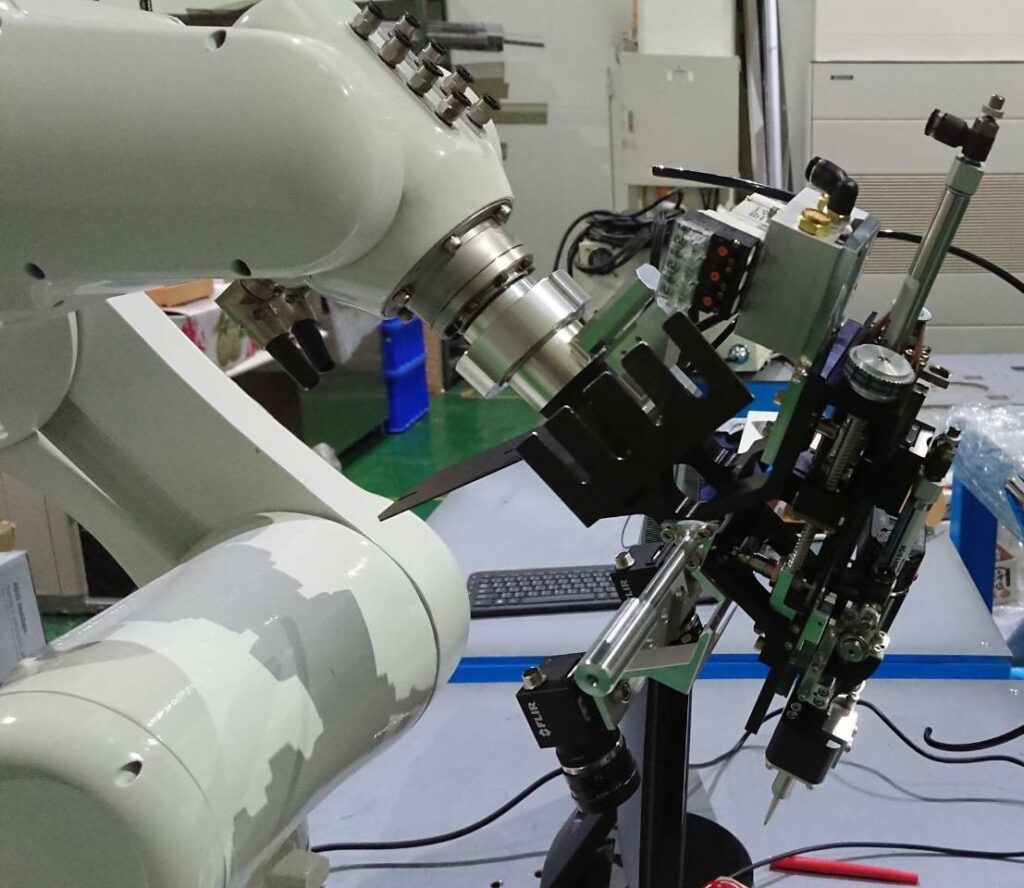
The six-axis robot arm is selected to demonstrate the general applicability of the OCTRVS and tactile sensing system to any medical robotic systems. Specifically, we will develop a high-precision hair transplant robot based on the six-axis robot arm integrated with the OCTRVS vison system.