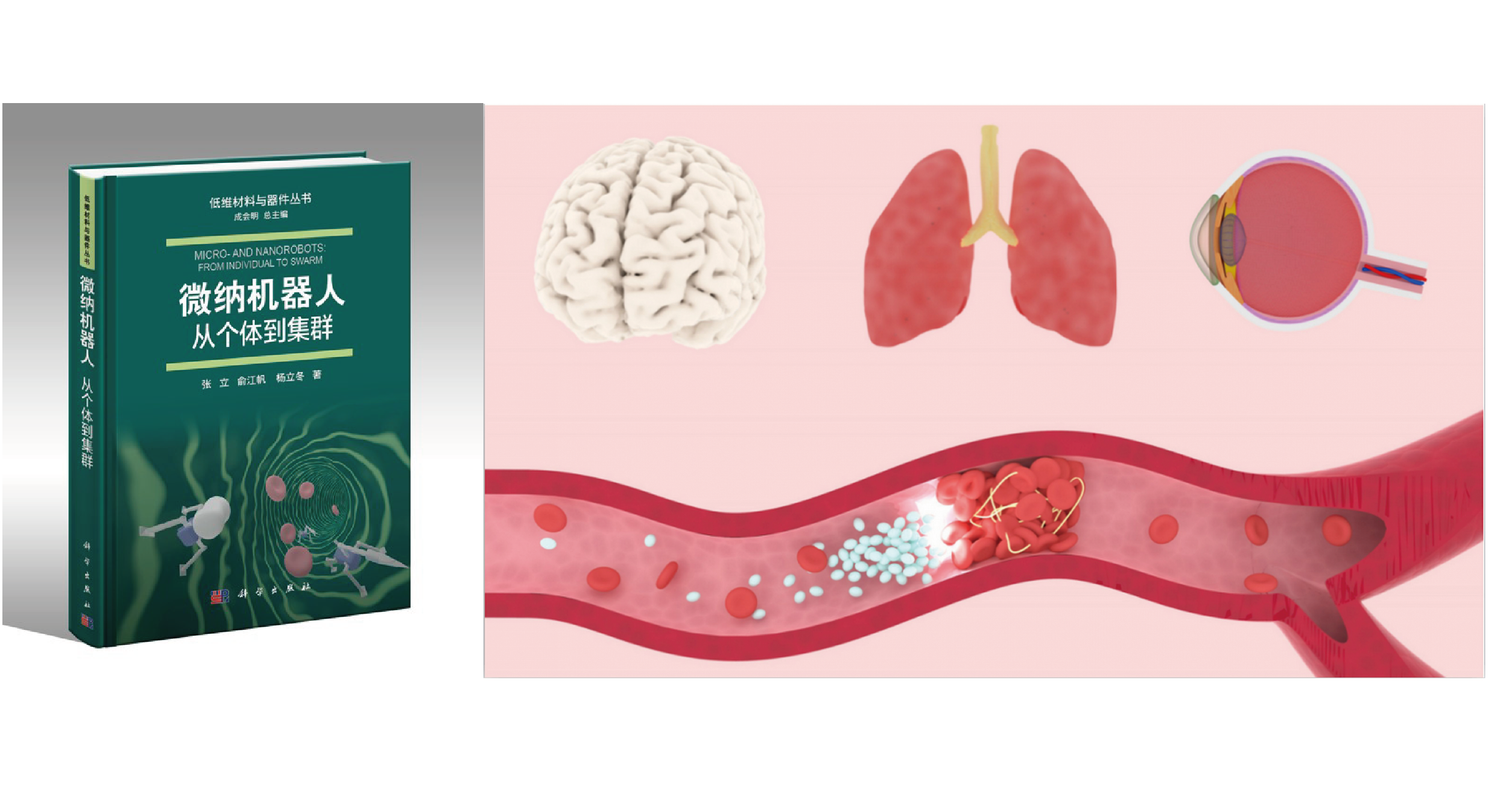
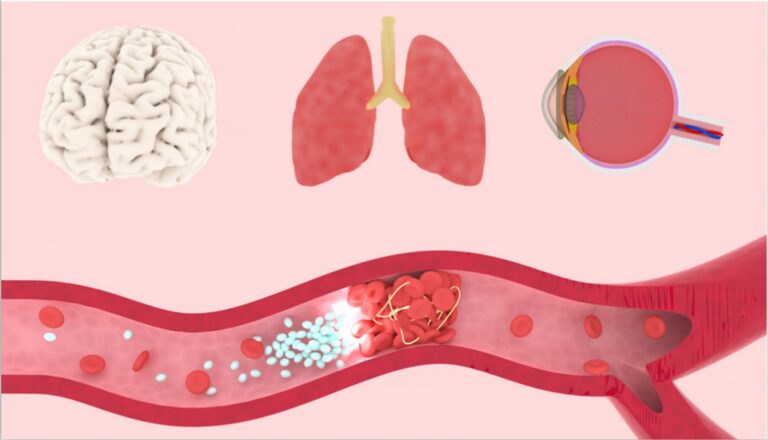
如要將微型機械人集群應用於人體醫學應用,應先充分了解它們在生物流體(例如血液及眼球內的玻璃體等)中的形成和運動行為。有別過往在水中進行的的研究,本項目將磁性活動集群分為三種類型,分別研究了兩種類型的活動集群在生物流體中的形成和運動行為,並系統地分析了生物流體的粘度,離子強度和內部高分子形成的孔隙結構等各項物理特性對微型機械人集群的影響,從而總結並提出了一套新穎的策略,用於預測不同種類微型集群機械人在各種生物流體中的行為。
我們通過多次實驗,成功驗證了該策略的可行性。在高粘度生物流體體系中(比如眼球的玻璃體),基於流場生成的磁性粒子集群會較為穩定;而在高離子強度的液體中(比如消化道的胃酸),基於磁場生成的集群的表現會更好。在血漿和血液中,上述兩種類型的微機械人集群都可以生成和按指令運動。項目正在進一步探索微納機械人集群在醫療上的應用,如在血管和人體內其他狹小空間內的介入式治療,並會研發相應的磁場生成和控制系統。