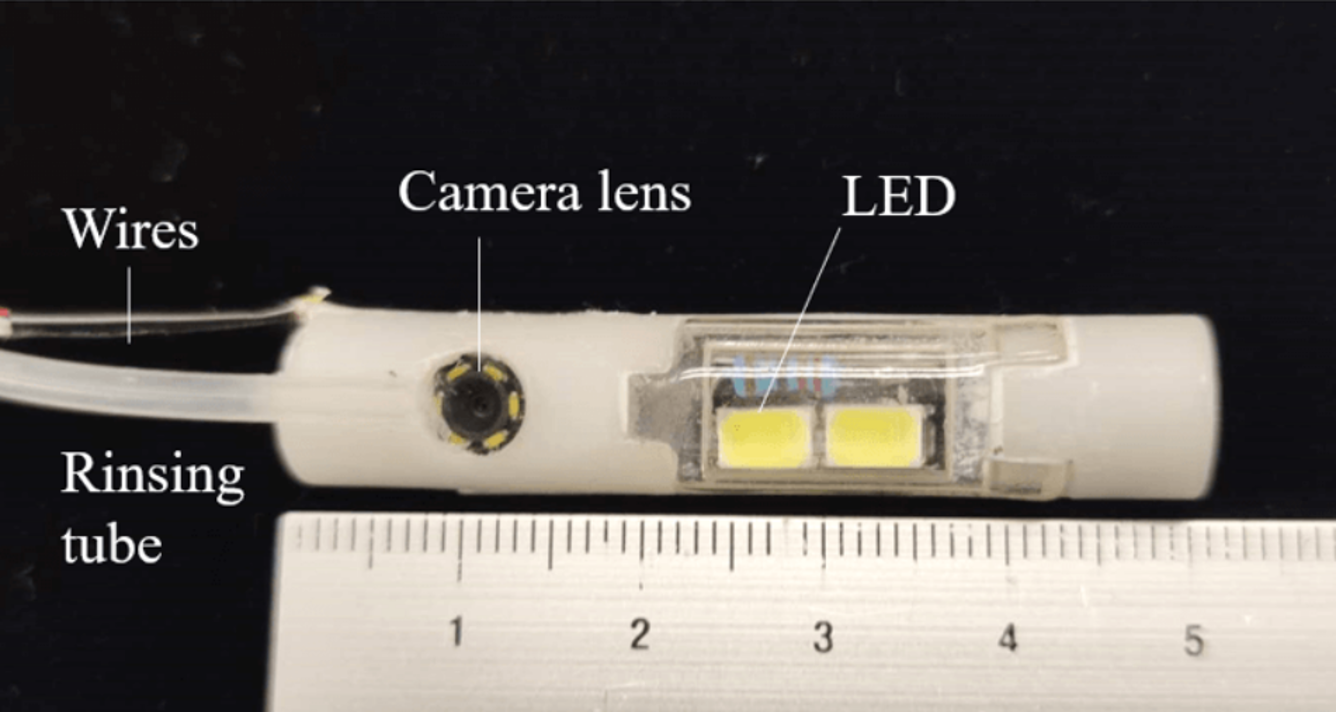
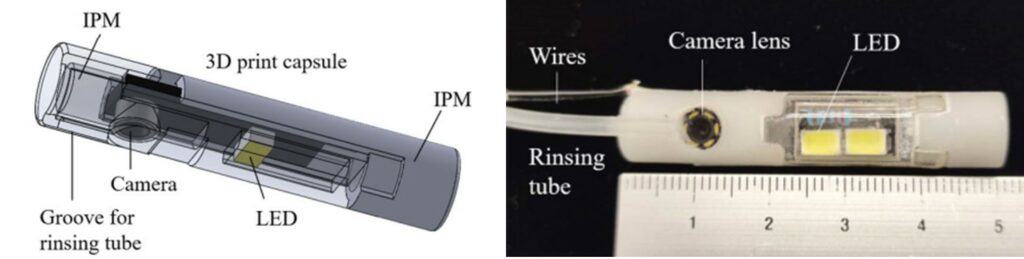
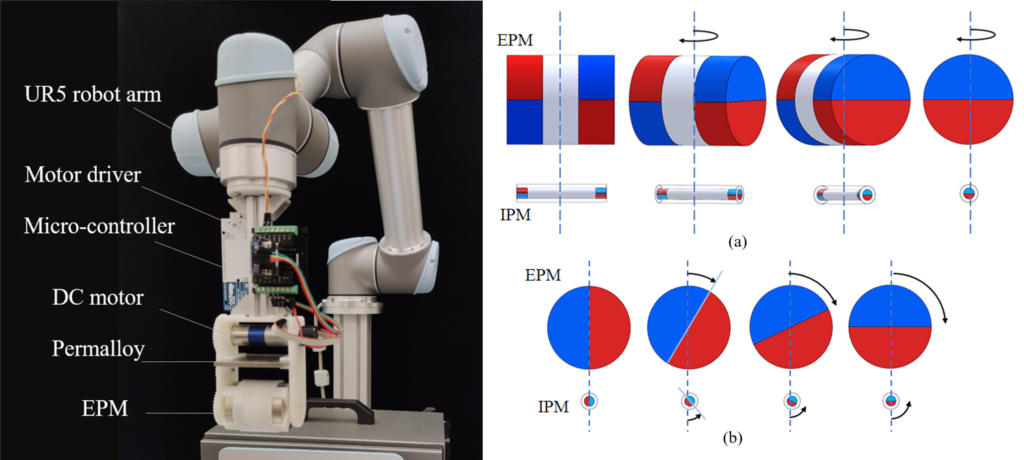
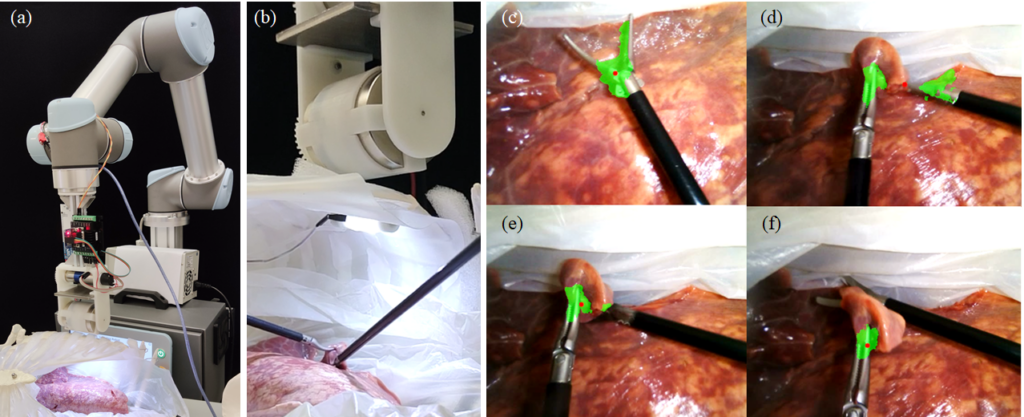
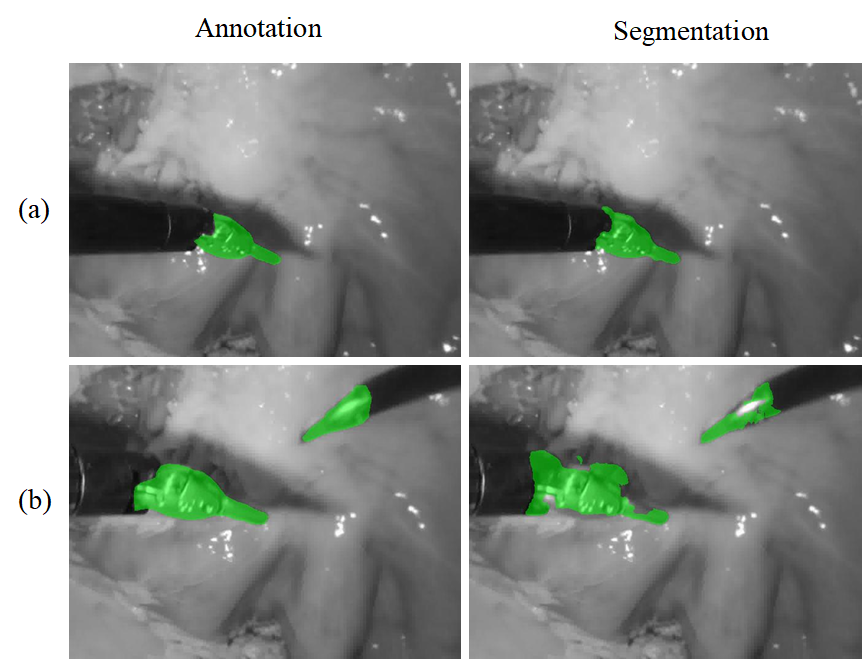
傳統的腹腔鏡會限制角度和視野,且容易跟其他工具碰撞,亦因為佔用了端口空間而需要更大或更多的創口,故此並不適用於微創手術。有見及此,本項目研發了智能磁錨定內窺鏡。這個智能系統當中包括一個機械臂,它會控制病人胸腔外的磁鐵,從而以磁力引導病人胸壁內的內窺鏡移動,為醫生提供多種視野。系統的人工智能更能幫助自動偵測及追蹤手術工具,醫生無須憂慮內鏡的控制,讓手術更簡化、安全及方便。 磁錨定內窺鏡立體設計模型 (左) 及真實樣機 (右) 控制磁鐵的機械臂(左) 及磁力驅動原理(右) 以智能系統成功完成肺部組織切除,實驗於人體胸腔模型完成 人工智能手術工具偵測,比較人類(左) 與 電腦(右)的表現,包括單個(a)和多個工具(b) 特點及優勢: 在體內更自由地移動,提供更廣闊視野 自動追蹤手術工具 避免佔用創口,有利單孔手術 避免與手術工具碰撞 多個鏡頭同時以多角度觀察手術目標