Conventional laparoscopes are not suitable for minimally invasive surgery as they limit the surgeon’s field of view and may collide with other instruments. They also occupy much port space and hence bigger incision or additional port is required. Concerning these problems, the project has developed an intelligent magnetic anchored and guided endoscope. The system included a robot arm that controls an external magnet above the patient’s chest. The endoscope staying just beneath the chest wall is guided by the magnetic force, providing multiple perspectives for surgeons. An A.I. assisted instrument detection allows this system to track the surgeon’s tools. Surgeons can work intuitively without worries of endoscope control.
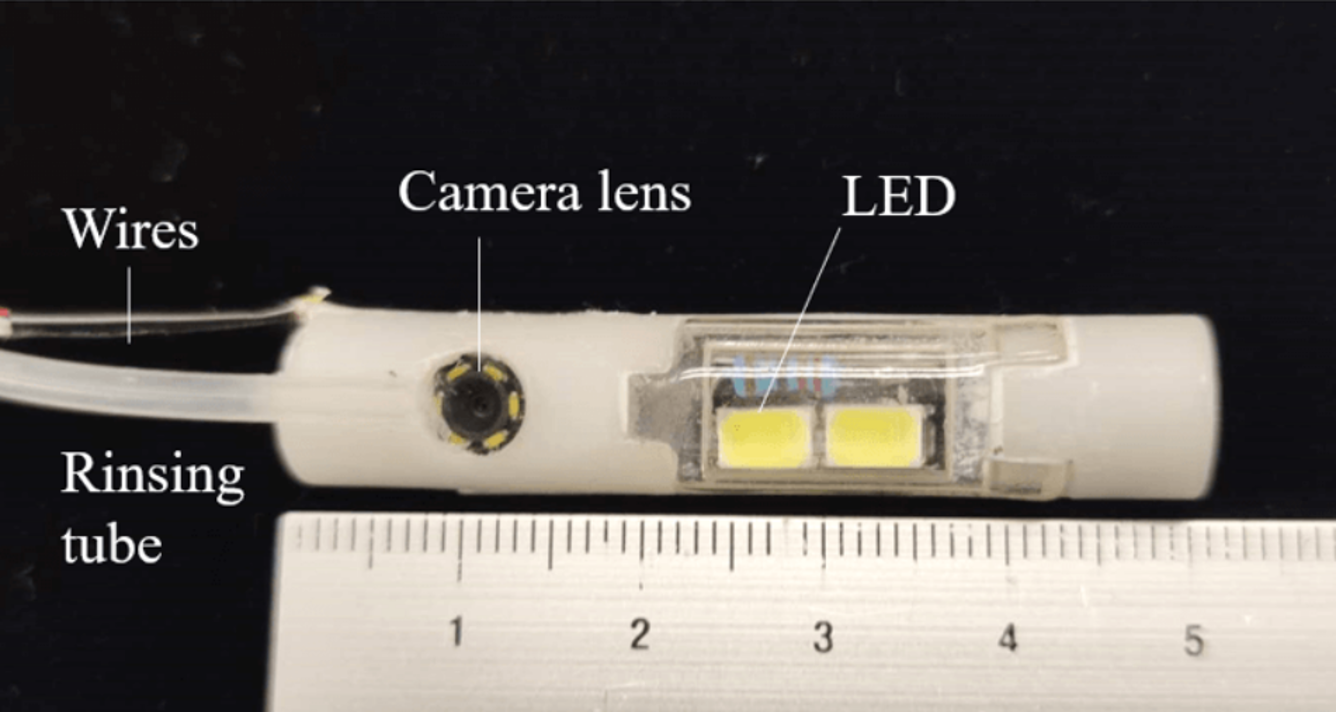
The magnetic anchored endoscope design 3d model (Left); prototype (Right)
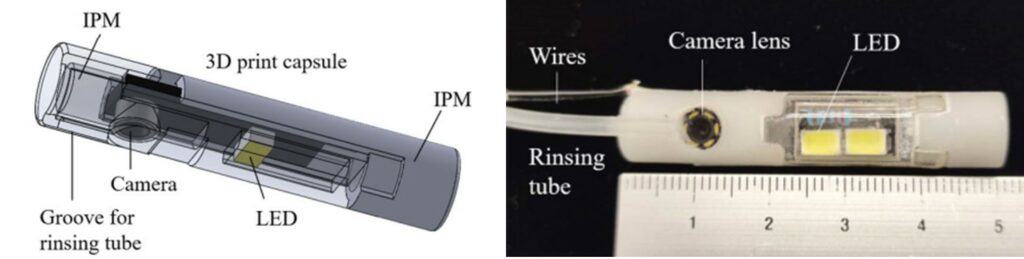
The robotic magnet controller (Left); illustration of magnetic actuation principle (Right)
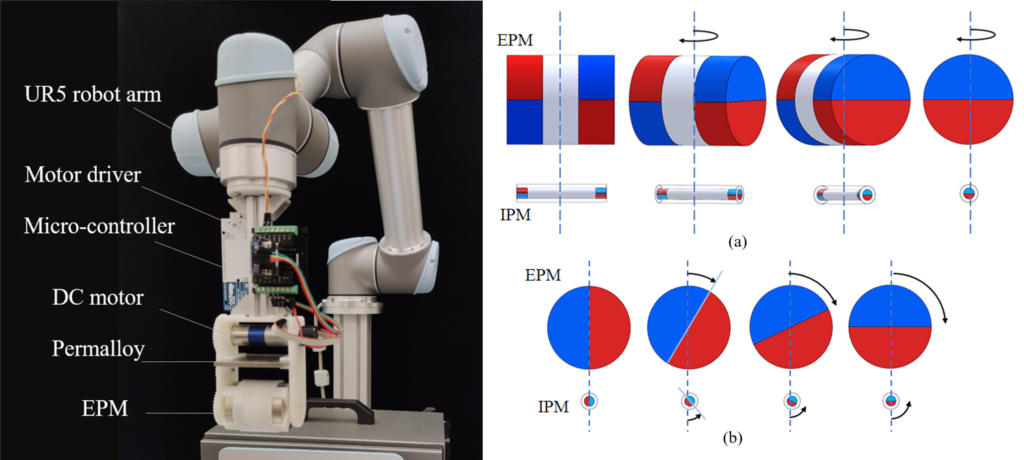
Lung wedge resection successfully performed using the system. Test completed inside a human chest simulator
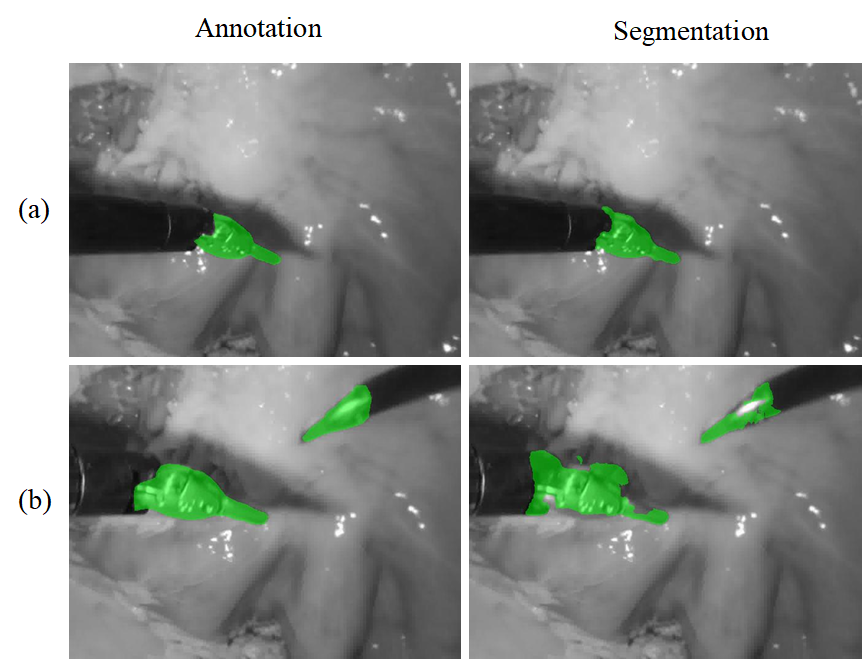
A.I. assisted instrument detection, comparing performance of human (left) and machine (right). Both the single instrument (a) and double instruments (b) cases were explored
Uniqueness and Competitive Advantages:
More freedom inside patient and better views for surgeons
Autonomous instrument tracking
Avoids port crowding, ideal for single port surgery