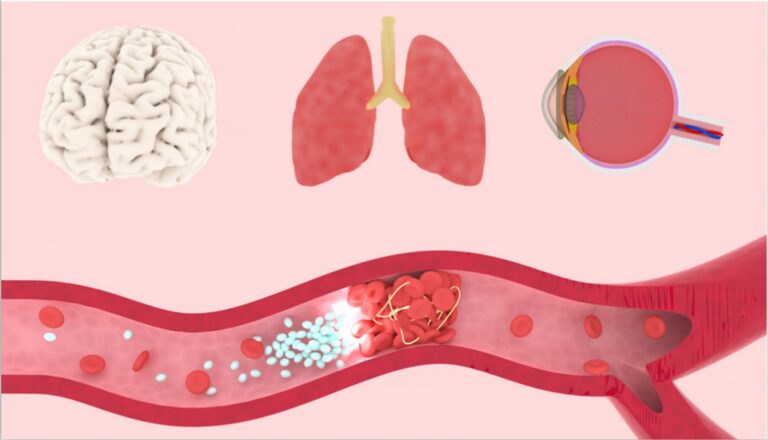
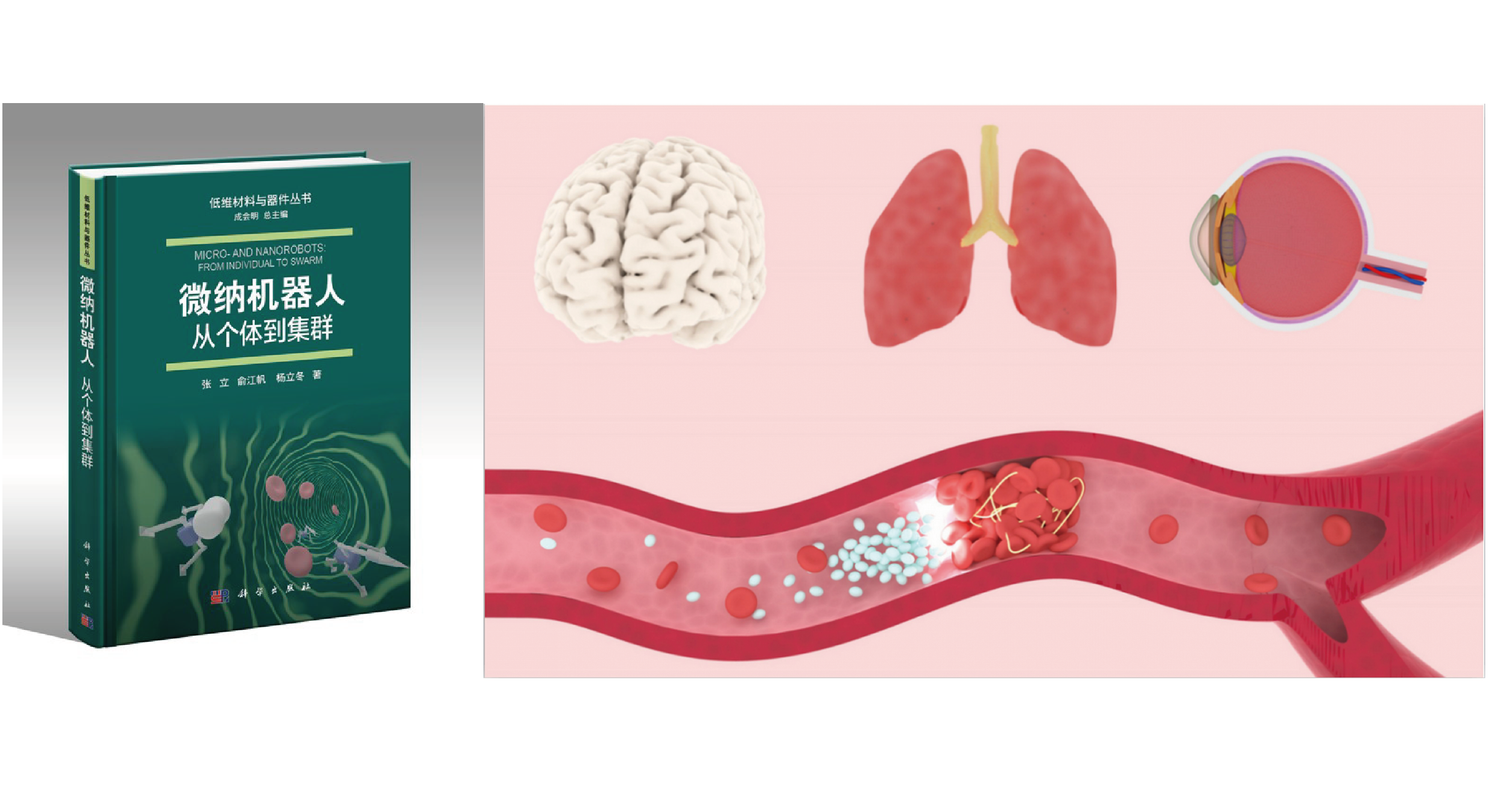
To apply the microrobotic swarms for medical applications in the human body, the generation and navigation behaviours of microrobotic swarms in bio-fluids, such as blood and vitreous humour, need to be investigated. Different from the relevant research that conducted in water before, this project categorised magnetic active swarms into three types, and individually investigated the generation and navigation behaviours of two types of the swarms in bio-fluids. The influences of bio-fluids, such as different viscosities, ionic strengths and mesh-like polymeric structures on microrobotic swarms were studied. A new strategy has been subsequently proposed to select the optimised swarms in different bio-fluids based on their physical properties.
The good agreement between the prediction and the experimental results fully validated the strategy. In high-viscosity fluids (such as the vitreous humour inside the eyeball), medium-induced particle swarms are more stable; while in fluids with high ionic strength (such as the gastric acid inside the stomach), magnetic field-induced swarms have better performances. It is also notable that both types of microswarms can be generated in the blood plasma and the whole blood. We are currently exploring the opportunities of using the microrobotic swarm for the minimally invasive treatment in vascular system as well as in the other confined and hard-to-reach regions inside the human body. Meanwhile, the electromagnetic system for autonomous control of the microrobotic swarm at the human scale are being developed.